Contatta un consulente,
+39-011.9007.820
Azienda
Politica per la Qualità
Prodotti
Robot Cartesiani Plug&Play
Robot Cartesiani Standard
Robot cartesiani Custom
Robot cartesiani Pick&Place
HW & SW
Applicazioni
News
Contatti & Preventivi
Azienda
Politica per la Qualità
Prodotti
Robot Cartesiani Plug&Play
Robot Cartesiani Standard
Robot cartesiani Custom
Robot cartesiani Pick&Place
HW & SW
Applicazioni
News
Contatti & Preventivi
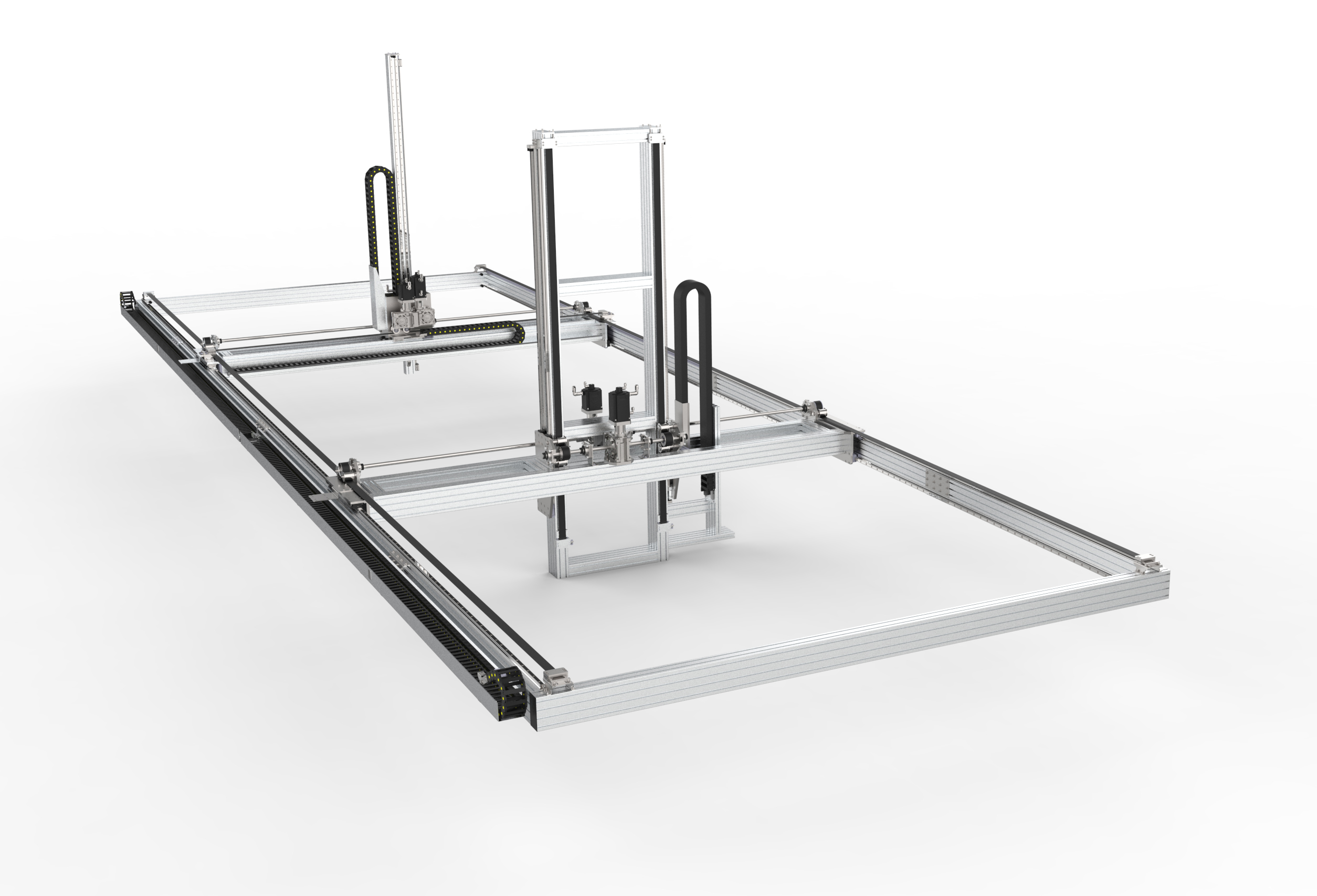
Robot cartesiano multiasse